+






Ddcsv3.1 업그레이드 Ddcsv4.1 4 축 Cnc 오프라인 독립 컨트롤러 + 하이브리드 서보 모터 키트 + 3d 엣지 파인더 + E-스톱 Mpg 75w24v, 업그레이드

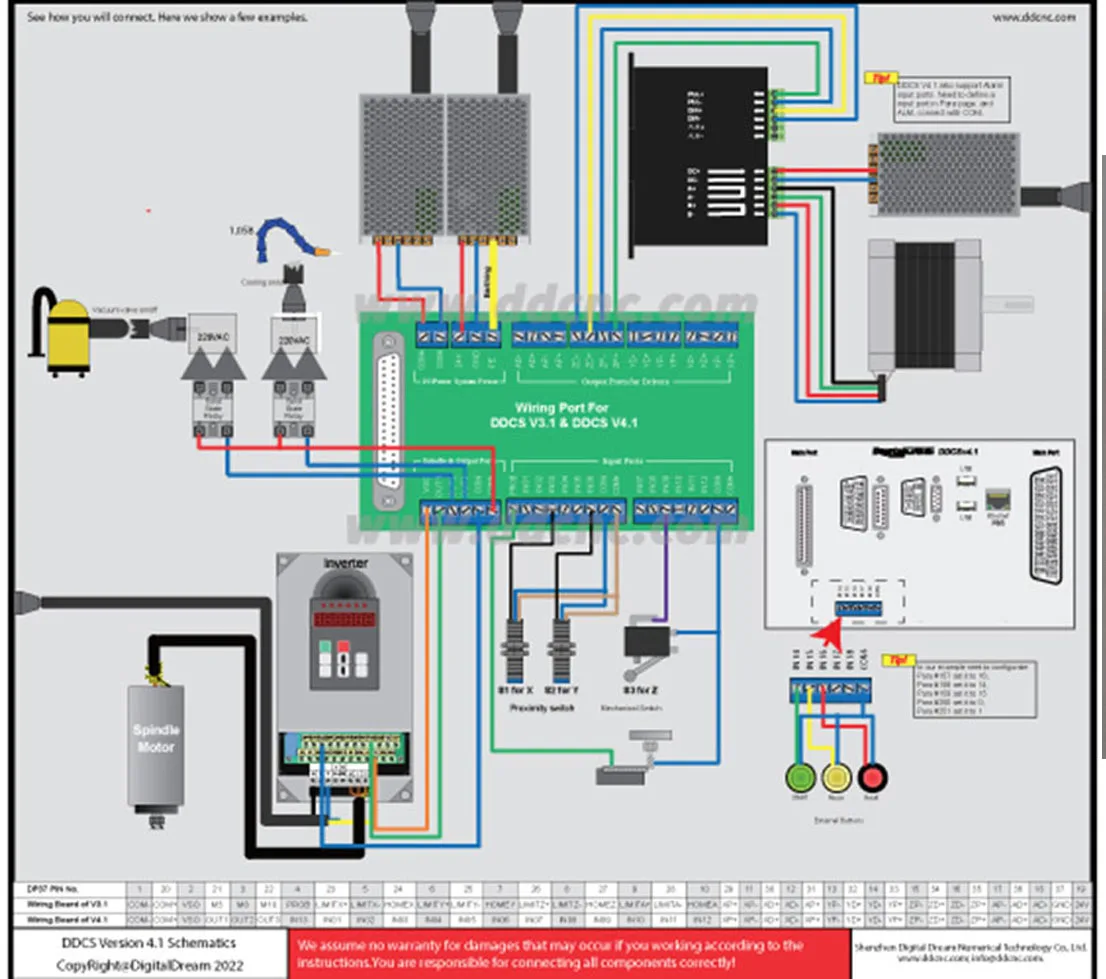
DDCS V4.1 은 DDCS V3.1, V2.1 및 v1.1 을 기반으로 업그레이드 된 3/4 축 오프라인 모션 컨트롤러입니다. DDCS V4.1 은 DDCS 시리즈의 일관된 간단하고 효율적인 기능을 계승하고 DDCS V3.1 의 단점에 따라 알고리즘을 향상시키고 프로그래밍 지침, 회전 설명 등을 추가합니다. 시뮬레이션 기능 등 개선, IO 포트 구성 지원 등 제품 기능 DDCS CNC 컨트롤러 향상되었습니다 전체적으로 그것의 기능 안정적이고 강력한 더 적합 요구에.DDCS V4.1 CNC 시스템은 ARM + FPGA 설계 구조를 채택하고, 암은 인간-기계 인터페이스 및 코드 분석 부품을 완성하며, fpga는 기본 알고리즘을 완성하고 펄스 생성 부품을 제어합니다. 그리고 fpga 속도 발생기는 32 비트 속도 발생기를 채택하여 속도와 가속 해상도를 높입니다. 합리적인 디자인, 안정적인 제어 및 편리한 작동, DDCS V4.1 은 제품 기능 및 패널 레이아웃 구조를 향상시키지만 17 개의 키는 여전히 모든 오프라인 제어 작업을 완료 할 수 있습니다. DDCS V4.1 은 범용 FANUC 호환 G 사용 설명서도 지원합니다.DDCS V4.1 은 DDCS v3.1 의 주요 기능을 계승합니다. 3.1 을 사용하는 데 능숙한 사용자에게이 설명서와 함께 DDCS V4.1 의 작동 방법을 빠르게 마스터링하고 기능을 능숙하게 사용할 수 있습니다. 주요 사용자가 컨트롤러를 켜기 전에 신중하게 읽기를 바랍니다.설명서, 이 컨트롤러를 능숙하게 작동 할 수 있습니다.

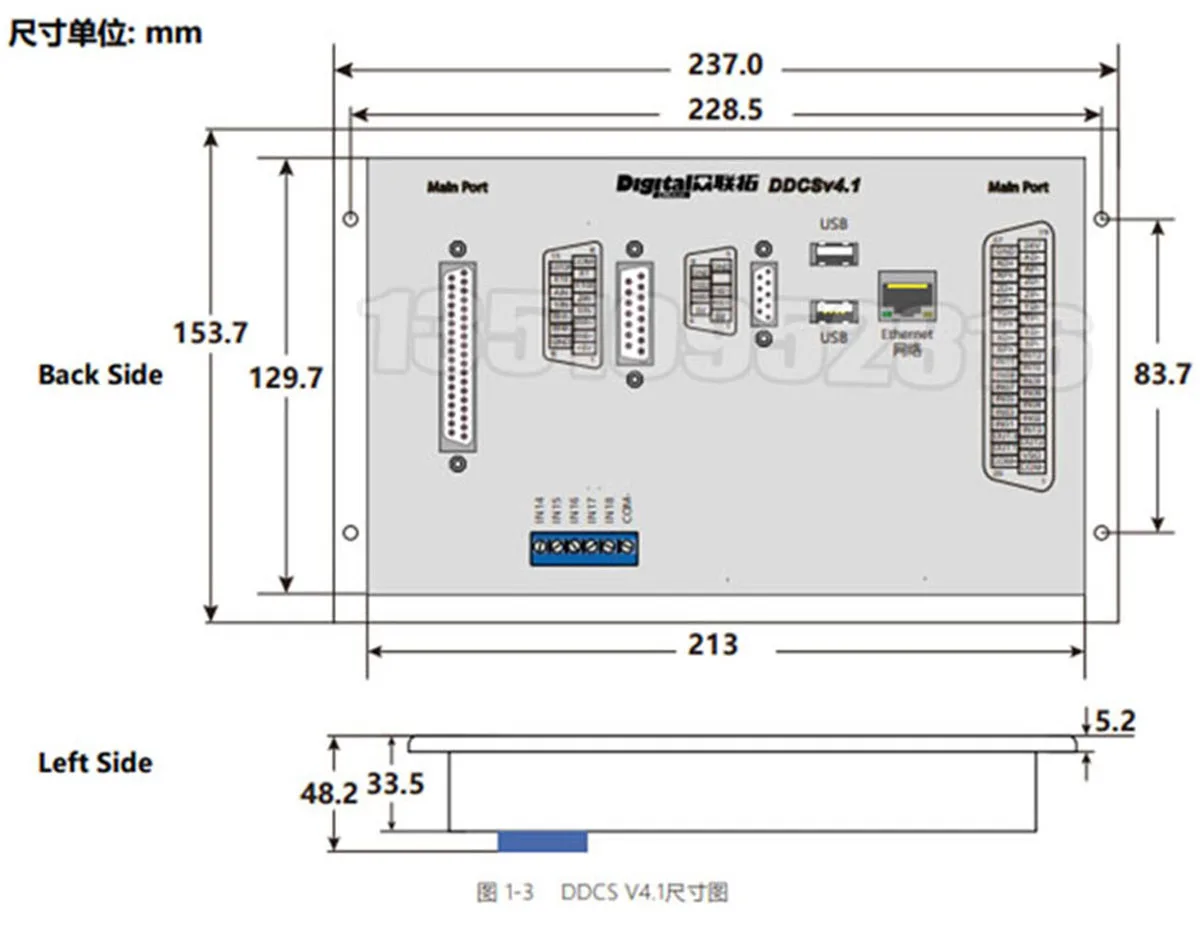
DDCS V4.1 간편한 성능 매개 변수:1) 7 인치 스크린, 17 키; 18 개의 옵토 커플러 절연 디지털 입력 인터페이스, 3 개의 옵토 커플러 절연 디지털 입력 포트;2) 새로운 버전은 알고리즘을 강화하고 모션 계획을 위한 새로운 알고리즘을 소개하여 구성 가능한 윤곽 오차를 통해 작은 선 세그먼트의 경로를 더 부드럽게 만듭니다.3) 1 채널 0-10V 스핀들 속도 제어 아날로그 출력 인터페이스, 스핀들은 서보 스핀들로 구성 가능4) 3-4 축 드라이브 모드는 차동 모드를 채택하고 고객이 선택할 수 있도록 이중 펄스 모드를 채택하며, 보간 펄스의 최대 출력 주파수는 500 khz입니다.5) ARM9 메인 제어 칩, FPGA 코어 알고리즘 칩,6) 7 인치 TFT 스크린; 크기: 1024x600 픽셀, 해상도: 72 픽셀/인치, 컨트롤러에는 17 개의 작동 키가 있습니다.7) 메인 제어 장치는 24VDC 전원 입력이며 전류 용량은 0.5A 이하입니다. IO 포트 전원 입력도 24VDC, 전류 용량은 0.5A 이하입니다. 주요 제어 전원 공급 장치 전원 공급 장치 제어 시스템, IO 포트 전원 공급 장치 전원 공급 장치 IO; IO 포트에 전원이 공급되지 않으면 모든 IO 포트가 잘못되었습니다.8) 표준 MPG 지원;9) 패널 버튼의 단일 축 수동 조깅 및 연결 및 고정 거리 작동 지원;10) 지정된 회선 및 가장 가까운 지점 작업 실행 지원;11) 플로팅 공구 설정, 고정 공구 설정, 코너 포인트 설정 및 공구 길이 측정 지원12) 배열 처리, 순차 가공, 평면 밀링 및 원통형 밀링 지원13) XYZA 4 축의 오프셋 조정 지원;14) 브레이크 포인트 일시 중지, 전원 끄기 브레이크 포인트 및 로드 브레이크 포인트 지원15) 다중 공작물 오리지널 작동 지원, 사용자는 원산지를 절약하고 필요에 따라 원산지를 적재 할 수 있습니다.16) X 및 Y 축의 중앙 작동 지원;17) 시뮬레이션 작동 및 시뮬레이션 중에 프로그래밍 경로가 기대에 부합하는지 여부를 신중하게 관찰하고 소프트웨어 제한 검사를 수행 할 수 있습니다. 시뮬레이션 중에 마음대로 일시 중지 할 수 있습니다. 시작 버튼을 누르면 시뮬레이션 일시 중지 브레이크 포인트에서 시스템이 중지됩니다. 시작 실행18) 이더넷 연결 포트를 통해 컨트롤러와 컴퓨터 간의 통신을 실현할 수 있으며 파일 읽기 및 복사와 같은 작업에 편리합니다.19) 메모리 컨트롤러 1G; G 명령 또한 읽기 U 디스크 및 크기 G 명령 않습니다;20) 컨트롤러의 언어는 국제 코딩을 채택하고 모든 언어를 지원합니다. 고객은 자신의 필요에 따라 다양한 캐릭터의 언어 팩을 만들 수 있습니다.21) DDCS V4.1 컨트롤러는 NPN 유형 리미트 스위치 만 지원합니다.22) 컨트롤러의 사용 권한에는 운영자, 관리자 및 슈퍼 관리자가 포함됩니다.DDCS V3.1 의 이전 버전과 비교된 새로운 기능:1) 이더넷을 통한 추가 파일 전송;2) 매핑 축 기능이 CNC 기능에 추가됩니다 (이중 Y 갠트리 구조 기계를 구성하는 데 사용할 수 있음).3) 스핀들은 서보 스핀들로도 구성 할 수 있습니다.4) 추가 바이어스 조정;5) 극성 좌표 프로그래밍 명령 및 회전 명령이 명령에 추가되고 반경 보정 명령이 완벽합니다.6) 모션 계획은 구성 가능한 윤곽 오차를 통해 작은 선 세그먼트의 경로를 더 부드럽게 만들기 위해 새로운 알고리즘을 소개합니다.7) 코너 감지, 내부 서클 센터 감지 및 외부 서클 센터 감지와 같은 총 3 가지 감지 기능 지원8) 지정된 회선 시작 기능 및 가장 가까운 점 시작 기능 개선, 파일의 크기에 관계없이 몇 초 이내에 빠르게 시작 할 수 있습니다.9) 시뮬레이션 기능 향상. 시뮬레이션 중에 확대 배율을 조정하여 프로그래밍 경로가 기대 여부를 신중하게 관찰하고 소프트웨어 제한 검사를 수행 할 수 있습니다. 시뮬레이션 중에 마음대로 일시 중지 할 수 있습니다. 시작 버튼을 누르면 시뮬레이션 일시 중지 브레이크 포인트에서 시스템이 시작됩니다. 구현;10) 입력 포트 측면에서 포트 기능을 임의로 구성 할 수 있으며 드라이버 알람 지원이 추가됩니다.11) a-축의 경우 사이클 엔코더가 추가됩니다. 사이클 엔코더는 계속 증가하는 파일 처리에 특히 유용합니다.12) 구획 오류 프롬프트도 있습니다. DDCS V3.1 가본 적이 없으며 구문 분석 오류가 있으면 직접 중지됩니다.13) 언어는 기본적으로 모든 언어를 지원하는 국제 코딩을 채택합니다. 장점은 다양한 문자의 언어 팩으로 사용할 수 있다는 것입니다.14) 공작 기계가 고속으로 이동할 때 직접 정지로 인한 거대한 충격을 해결하기 위해 비상 정지 가속 구성 매개 변수 증가;15) FPGA 속도 발생기는 32 비트 속도 발생기를 채택하고 속도와 가속 해상도가 더 높습니다.




소개:
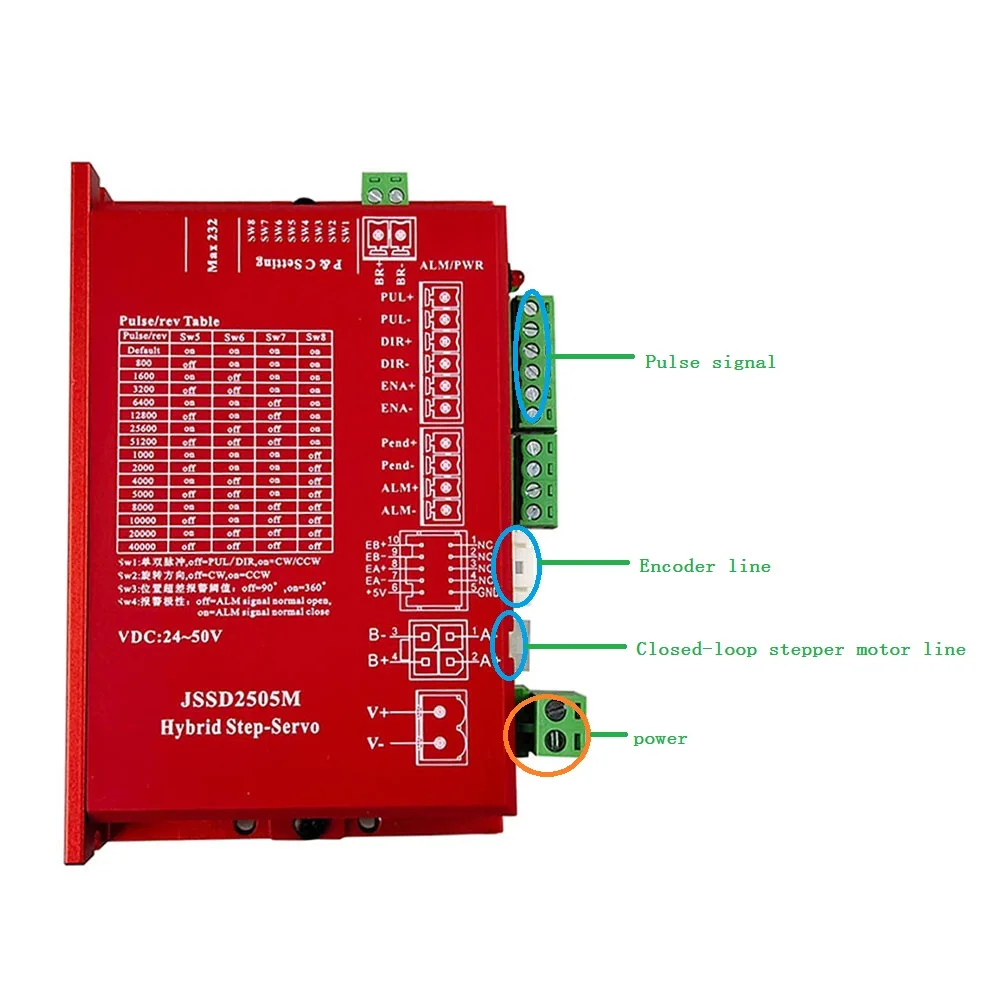
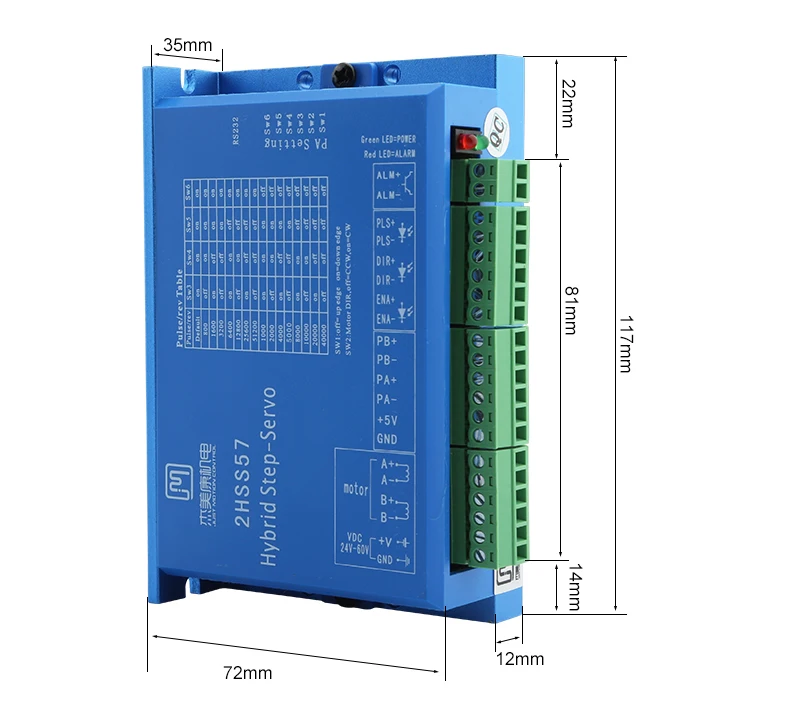
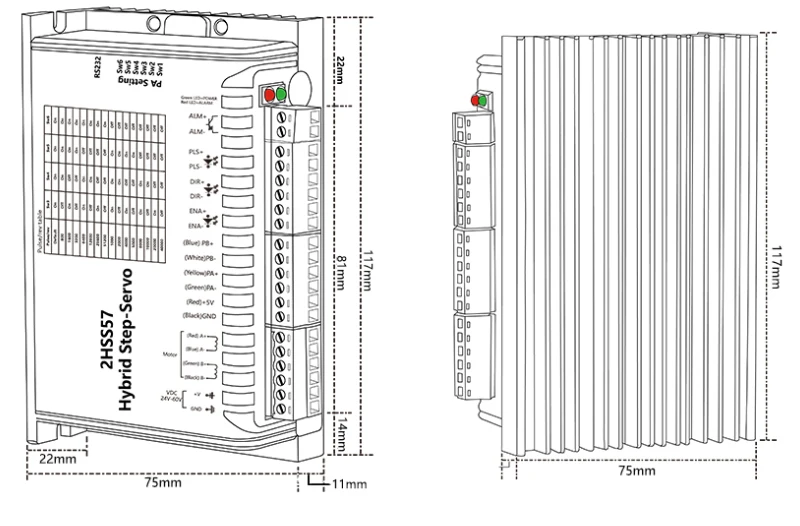
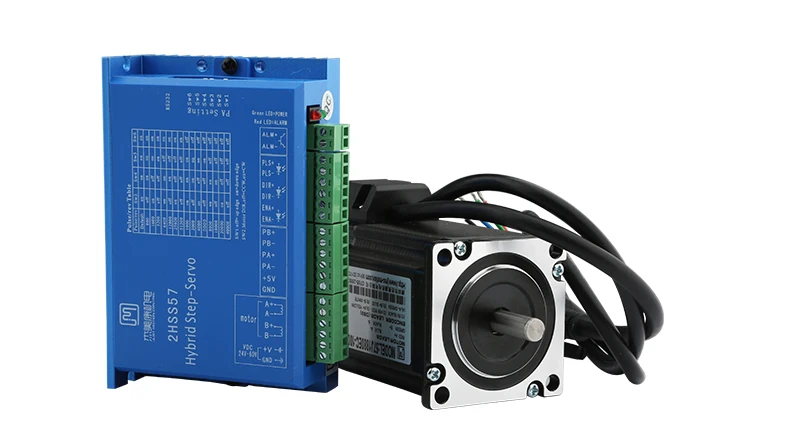
JSSD2505M 하이브리드 스텝 서보 드라이브 시스템은 디지털 스테핑 드라이브의 서보 제어 기술의 완벽한 통합입니다. 이 제품은 스테핑 및 서보 모두와 호환되는 일반적인 3 루프 제어 방법 (위치 루프, 속도 루프 및 전류 루프) 을 채택합니다. 2 상 하이브리드 스테퍼 모터를 구동합니다. 그것은 매우 비용 효율적인 모션 컨트롤 제품입니다.

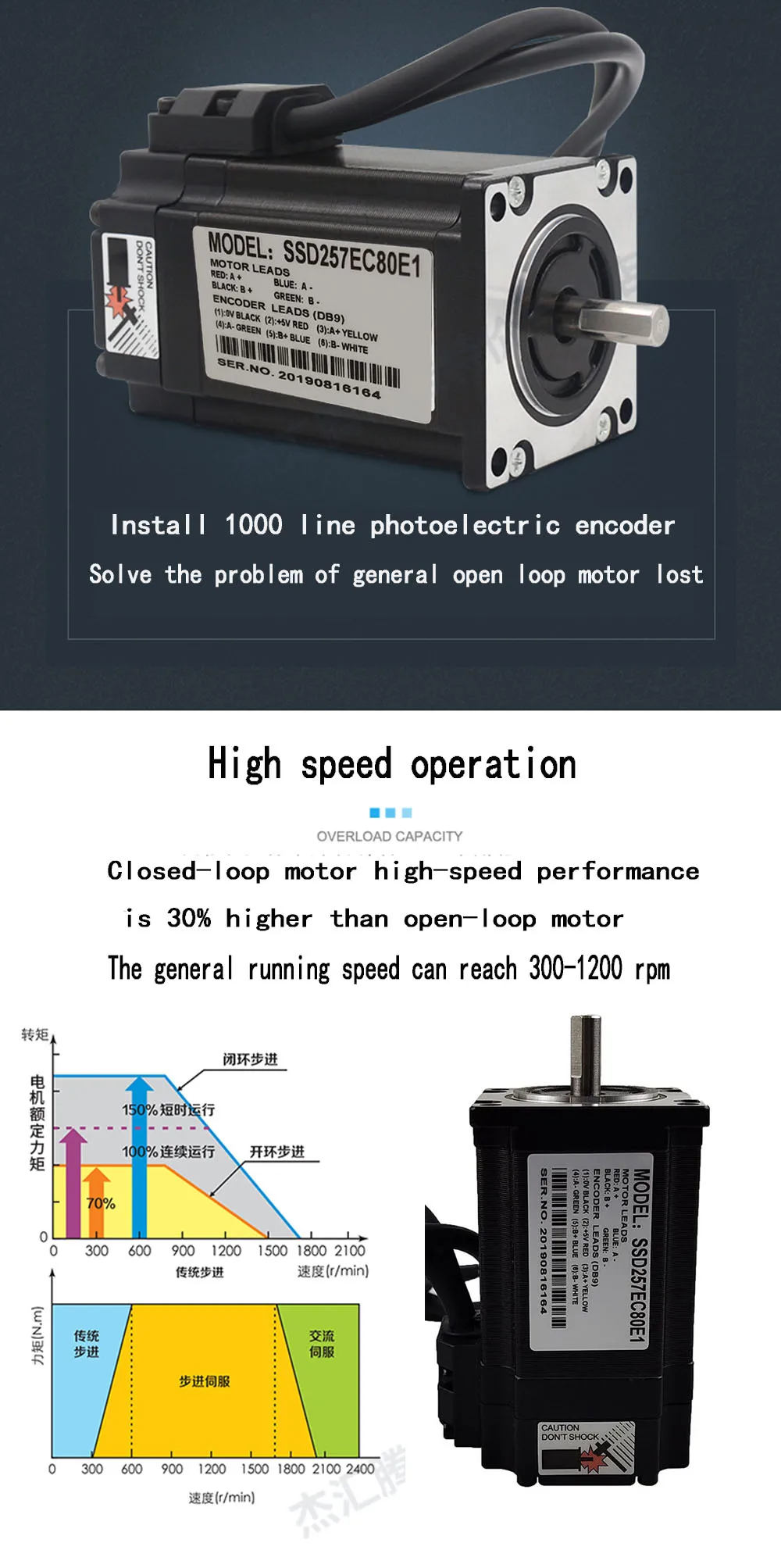
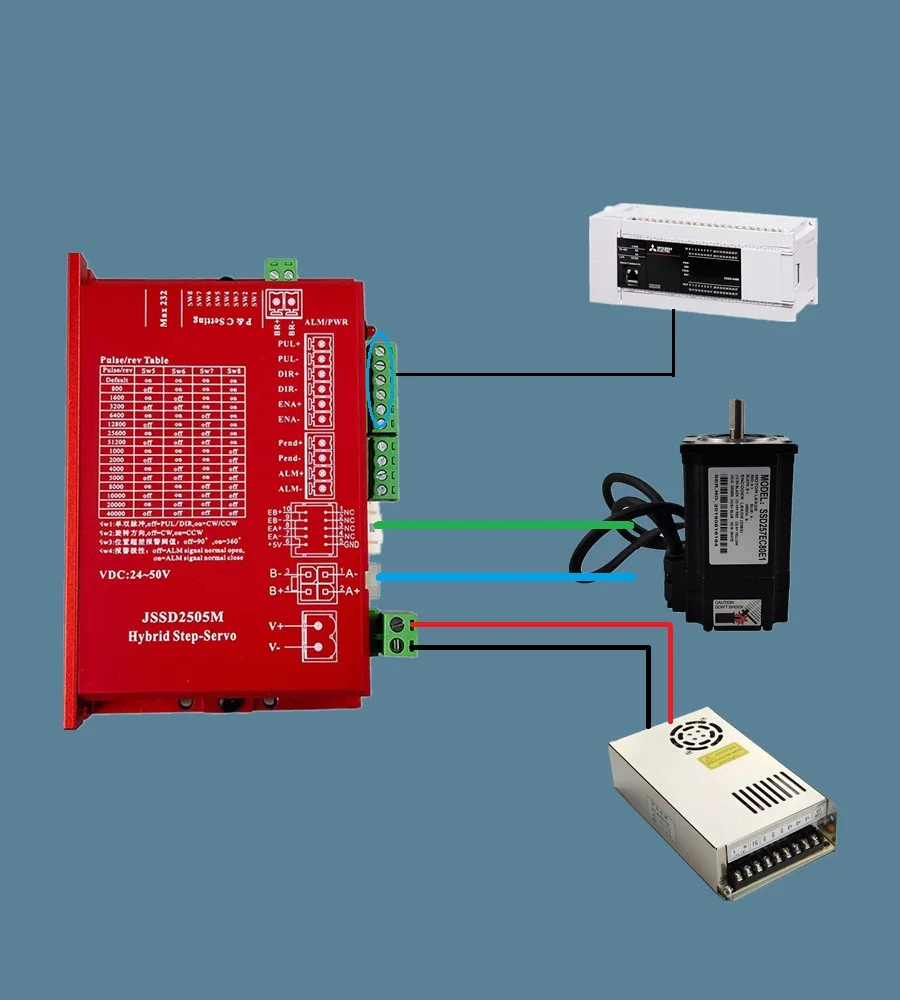
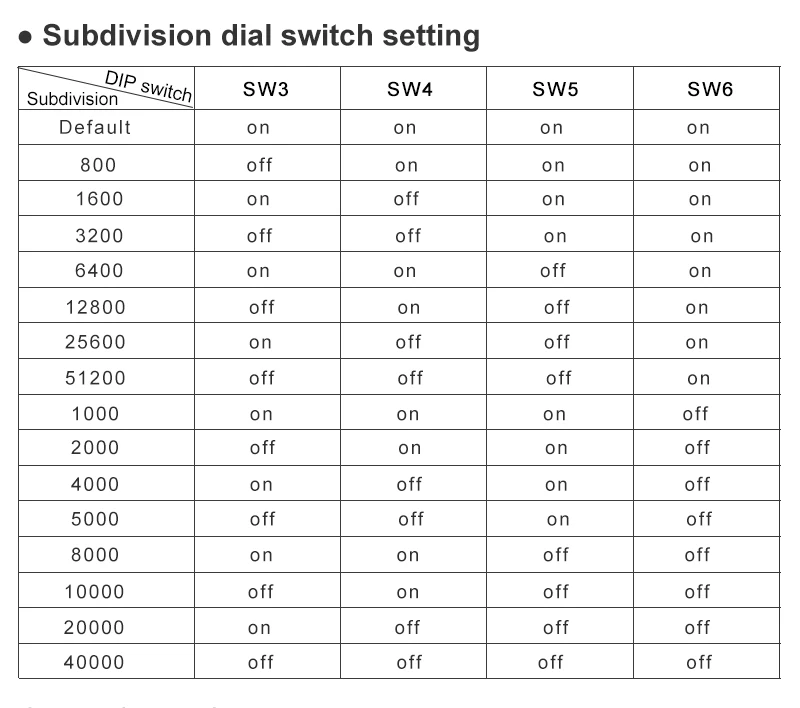
주요 특징:
1): 완전 폐쇄 제어, 모터는 1000 라인 인코더 장착, 100% 토크 출력, 세분 설정 범위는 2-256, 고속 반응, 고속2): 광학 절연 오류 경보 출력 인터페이스 ALM, 전류 루프 대역폭 (-3dB) 2KHz (일반), 속도 루프 광대역 500Hz (일반)3): 포지션 루프 광대역 200Hz (일반), RS232 직렬 통신으로 매개 변수 다운로드 또는 변경 가능4): 과전류, I2T, 과전압, 저전압, 과열, 과속, 공차 차단세부 모터:모터 모델: SSD257EC80E1모터 전류: 4A출력 토크: 2.2n. m본체 길이: 약 99MM출구 모드: 단일 출력 샤프트정격 속도: 1000 rpm (무부하 속도: 2000 rpm)출구 모드: 2 상 4 선 (모터 라벨에 따라 배선되어야 함)스테퍼 드라이브의 세부 사항:드라이브 모델: HBS57 (Nema 23, 57 스테퍼 모터 용)펄스 신호: 3.3V/5V/24V 호환. 없음 문자열 저항 가용성전압 범위: DC16-50V세분 설정: 800-51200 세분새로운 32 비트 DSP 디지털 57 폐쇄 루프 스테퍼 모터 드라이버, 조각 기계, CNC 장비를 사용할 수 있습니다. PWM 전류 제어, 저소음, 고속 토크는 일반 드라이브보다 40% 더 크습니다.


Nema23 2.0nm 회로 모터 deslizante 57j1880ec-1000 1 드라이버, 2hss57 1 pces 3 metro codificador cabo
성능 소개
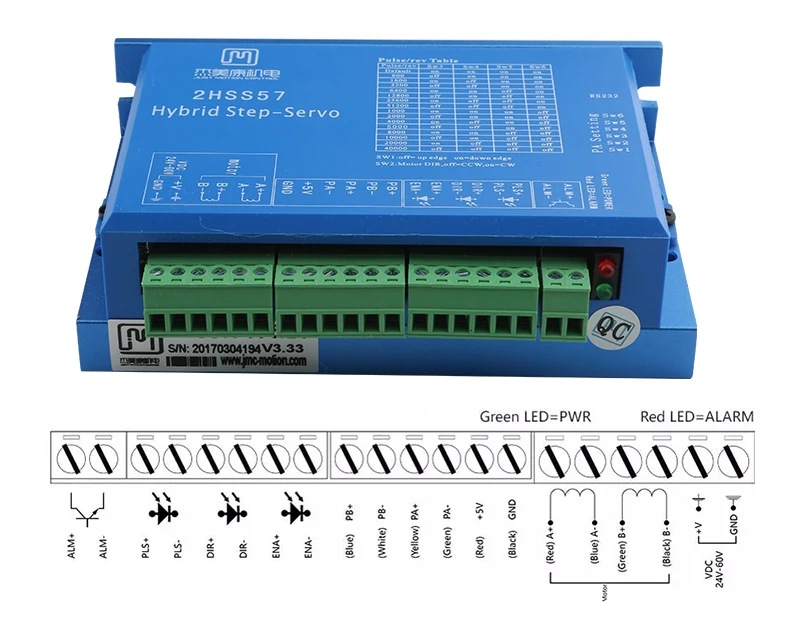
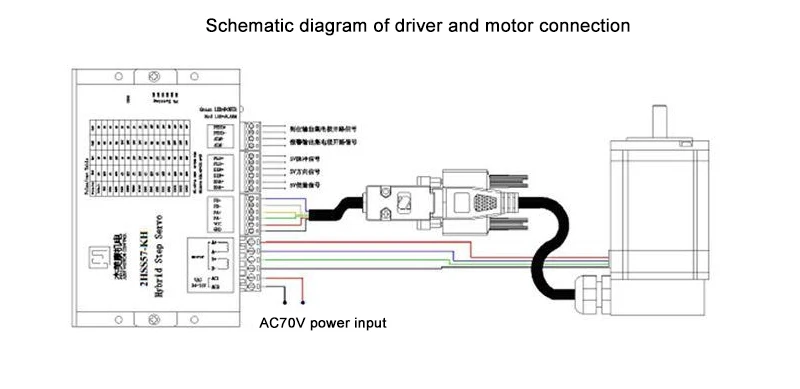
2HSS57 하이브리드 스테핑 서보 드라이브 시스템은 디지털 스테핑 드라이브 기술의 서보 제어의 조합으로, 이 제품은 일반적인 3 루프 제어 방법 (위치 루프, 속도 루프 및 전류 루프) 을 사용합니다. 이중 장점 스테퍼 및 서보와 호환되며 2 상 하이브리드 스테퍼 모터 구동에 적합합니다.
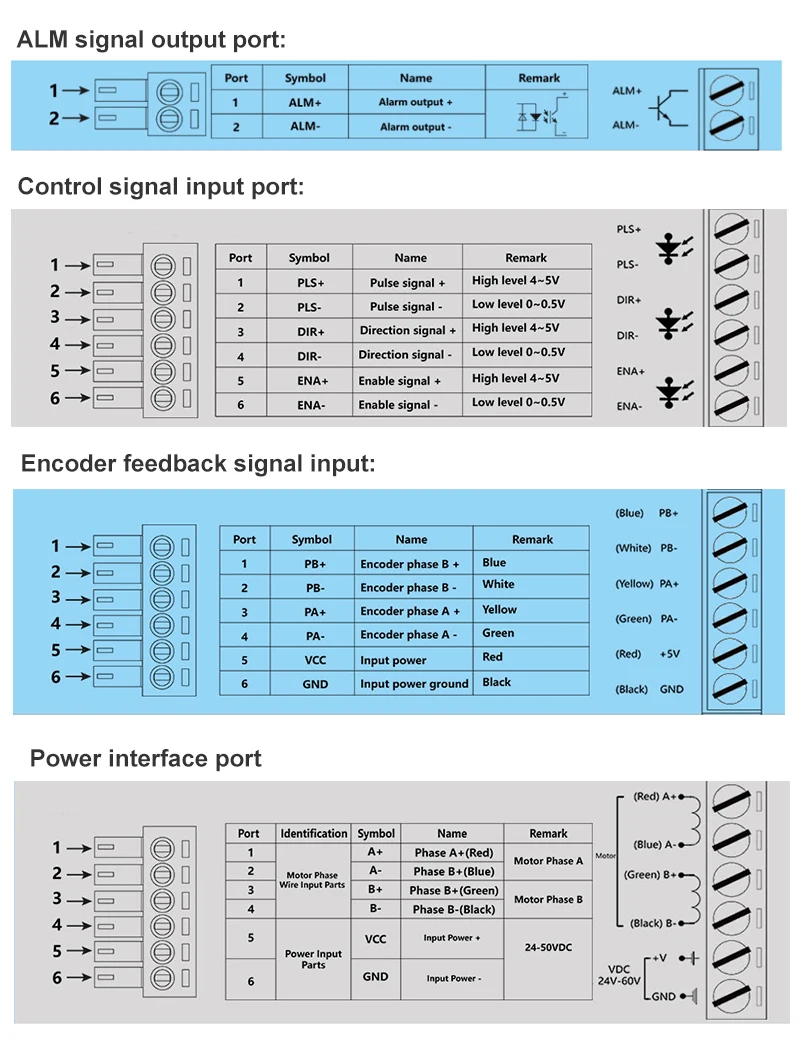

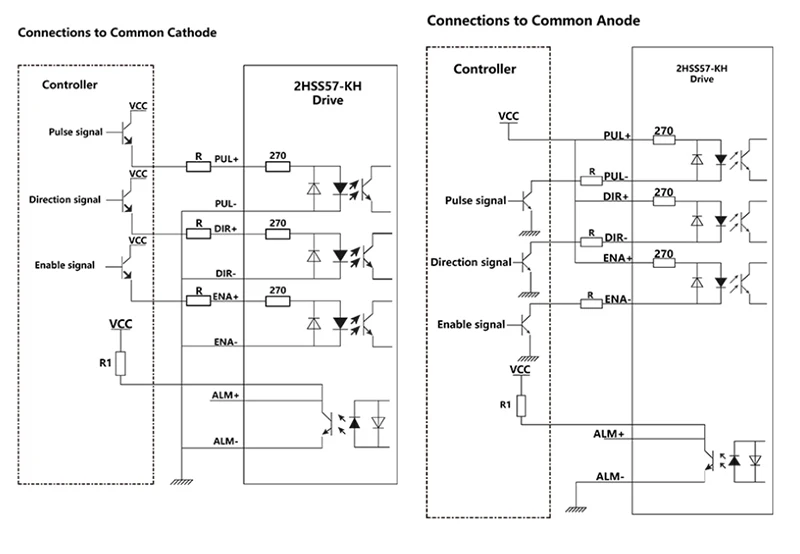

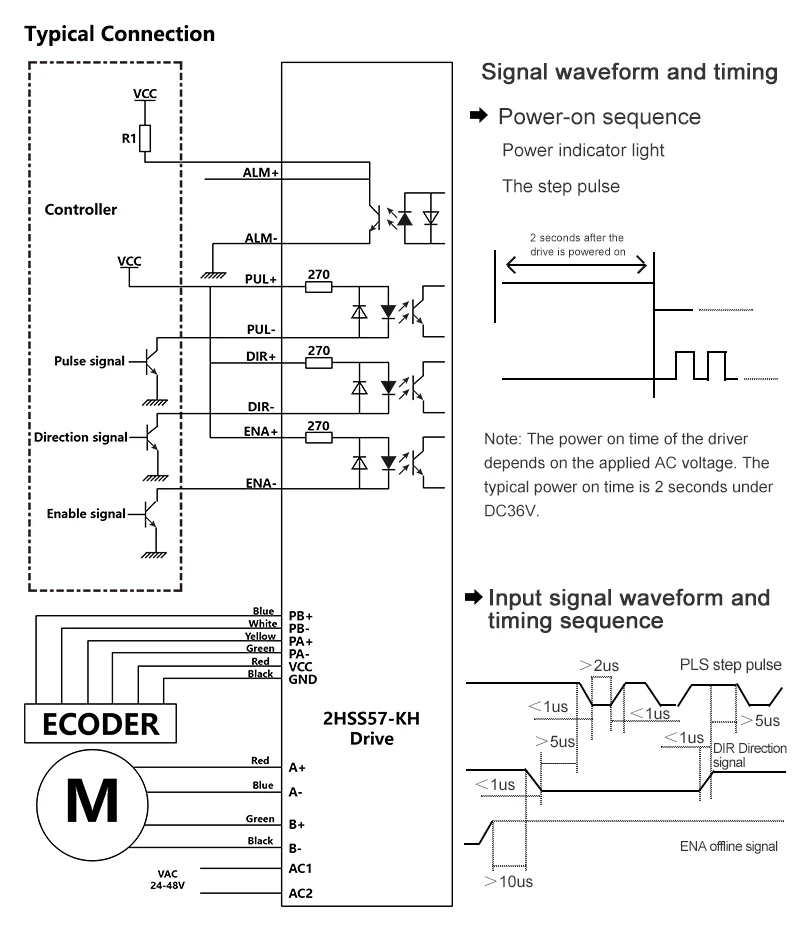
참고: vcc = 5v, r = 0 인 경우; vcc = 12v 인 경우 r = 1k (전원> 0.125w); vcc = 24v 인 경우 r = 2k (전원> 0.125w); r1 (3-5k) 을 제어 신호 단자에 연결해야합니다.
입력 여백 설정
Sw1 딥 스위치는 입력 가장자리 설정을 감지하고, 외부는 가장자리가 올라가는 유효함을 의미합니다.
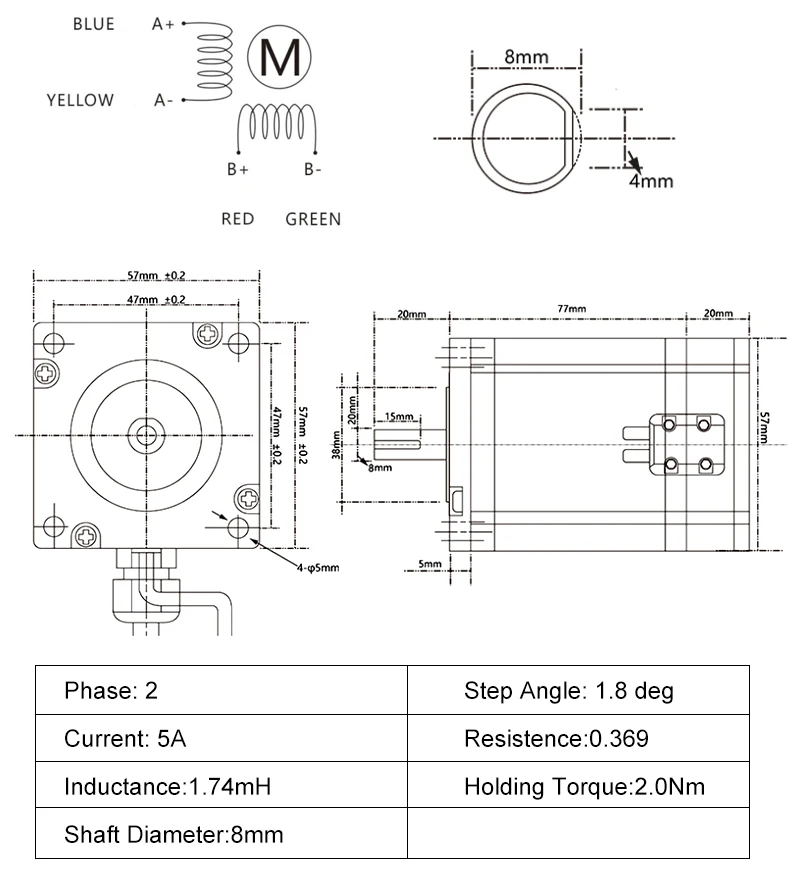
논리 구성 방향Sw2 다이얼 스위치가 꺼지거나 켜지면 현재 모터 이동 방향, off = ccw,on = cw 를 변경할 수 있습니다.

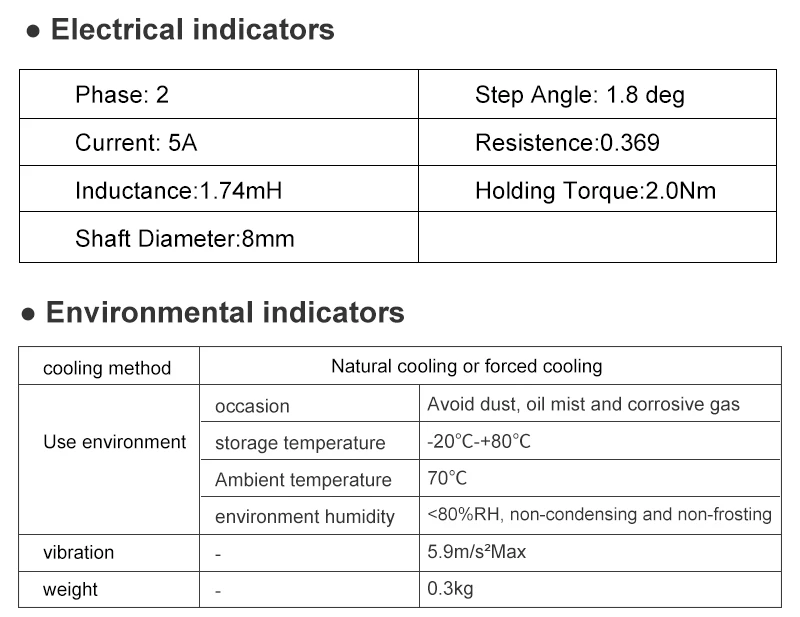
일반적인 명세:2 단계 각도: 1.8 도 전류: 5 번째 저항: 0.36 인덕턴스: 1.74mh 유지 토크: 2.0nm 샤프트 직경: 8mm
1. 손실 단계 없음, 높은 위치 정확도 2. 100% 정격 출력 토크 3. 4. 작은 진동, 저속에서 안정적이고 신뢰할 수 있습니다. 1000 라인 인코더와 호환 5. 과전류, 과전압, 오버 포지션 오류 보호


주요 응용 분야광고, 조각, 포장, 레이저, 전자 제품, 의료, 인쇄, 목공, 기계, 도자기, 돌 등짧은 소개2 상 하이브리드 스테핑 서보 드라이브 시스템은 서보 제어 기술을 디지털 스테핑 장치에 통합합니다. 그것은 전류 루프, 속도 루프 및 위치 루프를 포함한 일반적인 3 루프 제어 방법을 채택합니다. 이 제품은 스테핑 및 서보 시스템의 장점을 가지고 있으며 경제적이고 효율적인 모션 제어 제품입니다.기능1. 완전히 닫힌 루프 제어, 1000 라인의 모터 인코더, 100% 토크 출력 2 에 가까운. 섹션 조정 범위는 2-256, 빠른 반응 속도와 고속, 절연 고장 경보 출력 3 을 넘어서 광학 인터페이스입니다. 전류 루프 대역폭 (-3 db) 2khz (일반 값), 속도 루프 대역폭 500Hz (일반 값), 위치 루프 대역폭 200Hz (일반 값) 4. rs232 시리즈를 다운로드 또는 매개 변수를 변경할 수 있습니다. 과전류, 과전압, 저전압, 과열, 과속, 차동 보호; 지우기 입력 경보

3 차원 엣지 파인더 3d 프로브 프로브:이 연결은 온라인 자동 측정을 실현할 수 있으며 오프라인은 5 방향 음향 광학 분배기로 사용할 수 있습니다. 하나의 기계는 다목적, 유연하고 편리하며 고정밀입니다.1. 반복성은 0.01 입니다.2. 그것은 절연 공작물을 측정 할 수 있습니다.2. 프로브 신호 npn에는 시스템 배선이 포함되어 있지 않습니다. 배선을 위해 시스템 설명서를 읽어야합니다. 일반적으로 도구 설정 장비를 지원합니다.배선없이 광전 분배기로 사용할 수 있습니다.3. 표준 매크로.PCB 플라스틱 브래킷 버전과 올 메탈 강화 버전의 차이점1. 외관은 기본적으로 동일합니다. 표시기 창에서 샌드위치 구조는 금속 브래킷 버전이고 순백색 브래킷은 pcb 플라스틱 브래킷 버전입니다. 구조의 차이로 인해 두 버전의 반복 정확성과 안정성이 달라집니다.2. pcb 플라스틱 브래킷 버전은 비교적 저렴한 비용을 가지고 있으며 구조적 안정성은 올 메탈 브래킷 보드만큼 좋지 않습니다.3. 모든 금속 브래킷 버전 완전히 말합니다 Renishaw's 원리, 상대적으로 복잡한 내부 구조, 높은 비용, 반복성 및 우수한 구조적 안정성.텅스텐 스틸 스타일러스와 루비의 차이점은 무엇입니까? ? Styli두 스타일러스의 가격은 동일하고 인터페이스는 m2.5 입니다. 텅스텐 강철의 진원도는 루비보다 좋습니다. 내구성은 텅스텐 강철보다 우수합니다.탐침의 작동 원리프로브 트리거Gnd 및 출력 신호 라인 연결호스트 컴퓨터가 신호를 받으면 매크로 프로그램을 통해 자동 센터링 및 녹화 좌표 기능을 실현합니다.시중에 많은 유형의 시스템이 있으며 배선 매크로 프로그램을 직접 완성해야합니다.배선 및 프로그래밍 지침을 지원하는 시스템이 있으면 배선 방법, 시스템 설정 및 매크로 프로그래밍에 대해 논의하십시오.프로브를 구입한 후 mach3 및 grbl 오픈 소스 스크립트 프로그램을 제공 할 수 있습니다.CNC 기계 사용자의 경우 Renishaw 표준 매크로 프로그램을 제공 할 수 있습니다.



일반적인 문제 및 개선 방법1. 데이터 라인 연결 정의빨간색 와이어는 10 (신호), 흰색 와이어는 GND, 노란색 와이어는 0V (GND) 입니다.2. 감지 중 스핀들 속도 켜기 여부A. 엣지 파인더는 최대 600 rpm의 회전을 견딜 수 있도록 설계되었습니다. 고속 회전은 에지 파인더를 손상시킵니다.B. 자동 감지를 위해 데이터 라인이 연결되어 있으면 스핀들을 열 수 없으며 회전이 데이터 라인을 깨고 에지 파인더가 손상됩니다.C. 때 데이터 라인을 연결, 단순히 사용되는 음향 광학 센터링로드, 또한 턴 메인 샤프트 회전 속도로 600 분당회전수/분.스핀들을 열지 않고 직접 프로빙.3. 판사 여부 홈 위치 파인더 정확한 후 트리거 신호?후 파인더 설치 척 테이블은 회전 조정 0, 프로브는 의해. 프로브가 자동으로 위치로 돌아간 후 에지 파인더를 회전하여 볼 수 있습니다.테이블 값이 일정한 값인지 여부.4. 정밀 에지 파인더가 메인 샤프트와 중앙 헤드에 재설치 된 후 동심도가 다른 이유는 무엇입니까?때마다 가장자리 파인더는 재설치, 동심도는 스핀들 척 영향을받습니다 동심도는 스핀들 척.프로브를 에지 파인더로의 동심도 편차.5. 기계 공작 기계 구조 정확도가 더 향상 될 수없는 경우 감지 정확도를 향상시키는 방법.A. 엣지 파인더를 회전해야 할 경우 센터를 600 rpm 속도로 회전합니다 (이 방법은 오프라인 및 비연결된 작업에만 사용할 수 있습니다.자동 센터 감지, 무선 에지 파인더를 구입하여 달성 가능)B. 스핀들과 척의 편차는 스핀들과 척의 에지 파인더를 만들어 0 위치 표시로 조정할 수 있습니다.중앙 헤드와 메인 샤프트에 비해 엣지 기기의 고정 위치와 방향이 향상되었습니다. (가장 근본적인 해결책은 개선하는 것입니다(스핀들 및 척 정확도)C. 엣지 파인더의 신호 처리 응답 시간은 약 0.0005 + 0.0001 초로 고정되지만 다양한 등급의 수치 제어 시스템 및 구성회로 세트의 경우 지연 일관성이 상당히 다릅니다. 프로브가 측정 표면에 접근할 때 축 이동 속도를 줄이십시오.지연 일관성 문제로 인한 오차를 줄이기 위해.


모델 번호 : DDCSV4.1 NEMA23 kit
근원 : CN (정품)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}